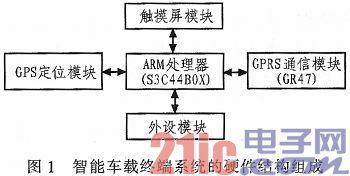
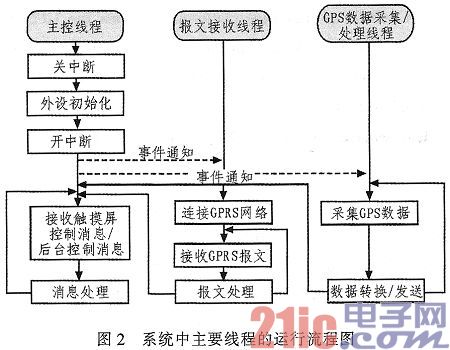
With the increase in domestic automobile use, road construction is developing by leaps and bounds, and the complexity of roads is increasing. These factors have brought difficulties to the safe operation of vehicles. How to make vehicles safe to drive and to effectively supervise vehicles has become the focus of attention of motorists and traffic control departments. Intelligent Transportation Systems (ITS) has optimized the traditional traffic management system by introducing information management technology to form a new modern traffic management system, which reflects the characteristics of informationization, intelligence and socialization. In the intelligent transportation system, the vehicle-mounted terminal is an important component. It uses the satellite global positioning GPS function to perform real-time supervision, control and scheduling of vehicles running on the road. When the specific design is implemented, the GPS receiver is used to receive the real-time motion position information of the vehicle, and the data is sent to the vehicle monitoring center; the monitoring center sends control to the vehicle terminal according to the received vehicle operating state data and the actual road monitoring status. Instructions to achieve scheduling and monitoring of running vehicles. This article refers to the address: http:// At present, electronic technology is developing rapidly, and some processor chips with strong processing capabilities and rich peripheral interfaces, such as ARM (Advanced RISC Machines) series processors, provide hardware technology foundation for developing multi-functional vehicle terminals; in addition, LINUX operations The system is mature and stable, and the peripheral driver support is rich. It is widely used in consumer electronics products, providing a powerful software support platform for the development of intelligent vehicle terminals. According to the functional requirements of the vehicle terminal system, this paper proposes a design scheme of intelligent vehicle terminal system based on ARM and LINUX. In the design scheme, the hardware platform mainly surrounds the S3C44B0X processor, and configures the GPS positioning information module, the GPRS communication module and other peripherals; the software platform uses the embedded LINUX as a platform to perform appropriate function reduction on the operating system components, and assists necessary Business data processing program. 1 hardware design The hardware component of the intelligent vehicle terminal system mainly includes four parts: a GPS positioning module, a GPRS communication module, a touch screen module and an ARM control module. The hardware structure of the system is shown in FIG. The touch screen module in this system uses a mature solution. The following focuses on the design of the GPS positioning module, GPRS communication module and ARM control module in this system. 1.1 ARM control module design The ARM control module in the intelligent vehicle terminal system is mainly used to set the working mode of the GPS positioning module, the GPRS communication module, the touch screen module and the peripheral device, so that the various hardware components work according to the design mode. Considering that the business logic control of this system is not extremely complicated, after careful comparison, the embedded microprocessor S3C44B0X integrated with ARM's ARM7TDMI core is selected as the processor of the main control module. The S3C44B0X processor is rich in internal devices, such as LCD controller, memory controller, IIC bus controller, IIS bus controller, and other external interfaces such as UART. Using this processor not only simplifies the overall hardware design of the system, but also reduces hardware costs. 1.2 GPS positioning module design The GPS positioning module in the intelligent vehicle terminal system is mainly responsible for receiving the positioning information of the positioning satellite, connecting the ARM main control module through the RS232 interface, and transmitting the positioning data for calculating the position and coordinates of the driving. Considering that in the normal driving environment, the GPS positioning module can only communicate with 4-8 satellites at the same time. When designing the GPS module of this system, considering the cost-effective selection criteria, the GPS-R25 GPS module of Shanghai Lilang Company was selected. The GPS module has such characteristics: support 12-channel C/A code receiving control, and monitor 12-channel satellite signals at the same time; internal 16-bit ARM processor core, battery can be charged in normal use; data error range is 1 ~ 5m; There is a serial interface; it meets industrial standards. 1.3 GPRS communication module design The GPRS communication module in the intelligent vehicle terminal system is a communication channel between the vehicle terminal and the background monitoring center, and transmits the processed GPS data and other monitoring data to the monitoring center, and receives the control data sent by the background monitoring center to the vehicle terminal. . The GPRS module selected by this system is the GR47 module introduced by Sony Ericsson. Its main features are: real-time operating system; built-in complete TCP/IP protocol, allowing a TCP/UDP transmission mechanism to be used with minimal pre-configuration and operation. Embedded controller for easy integration of user applications and reduced need for external controllers. GR47 supports dual-band GSM bandwidth 900MHZ/1800MHZ, can send and receive data through SMS short message service, CSD, HSCSD or GPRS, and supports voice processing and fax. It can access its TCP/IP stack via AT commands or embedded applications. Since the GR47 module has a built-in TCP/IP protocol stack, it can be directly controlled by the AT command and is convenient to use. 2 software design 2.1 Software module design The software part of the intelligent vehicle terminal system mainly comprises: a main control sub-module, a GPS acquisition/processing sub-module, a GPRS message communication sub-module and a display driver sub-module. The main control sub-module: responsible for initializing the hardware communication interface, the GPS positioning module controller, the GPRS communication module controller, the touch screen controller and other peripherals; loading the user configuration information from the peripheral memory chip; responding and processing the given by the front-end user Control commands, as well as control commands from the background monitoring center. GPS acquisition/processing sub-module: responsible for receiving the positioning data of the GPS positioning module. On the one hand, the positioning data is parsed, the position information is extracted therefrom, and the main control sub-module is transferred to display the real-time position information, so that the vehicle driver can understand the current geographical position; On the other hand, the data format conversion processing is performed on the positioning data, and then the converted data is sent to the background monitoring center by means of the GPRS communication interface, so that the background control center can understand the vehicle running information in real time. GPRS message communication sub-module: responsible for receiving the GPRS communication format message transmitted by the monitoring center, and converting the received message according to the agreed data format, and transmitting the converted message data to the internal message through the internal message The main control sub-module continues to process; in addition, the GPS data acquisition/processing sub-module is provided with a GPRS data message sending interface, and the data according to the GPRS agreed format is sent to the background monitoring center. Display driver sub-module: Receive user input control, such as: set navigation line, send driving status, etc.; display positioning information data, and control commands sent by the monitoring center. 2.2 Multi-threaded application design With the help of the multi-threading technology of the embedded LINUX system, the fast response mechanism of the interrupt, and the message-driven mechanism, combined with the functions that the intelligent vehicle-mounted terminal system needs to implement, the following thread design is performed, as shown in FIG. 2 . Main thread function description: 1) Master thread: This thread mainly implements initialization of GPS module controller, GPRS module controller, touch screen module controller, and other peripheral devices; receives internal messages sent by the message receiving thread, and processes control commands of the background monitoring center. Receiving internal messages sent by the GPS data acquisition/processing thread, updating and displaying the geographical location information in real time; responding to the processing of the front touch screen to control the user's settings, setting the driving route and other driving states: 2) Message receiving thread: After waiting for the main control thread to complete the basic hardware device initialization, the thread tries to connect to the GPRS communication network; after the connection is successful, the thread starts to receive the control command message sent by the background monitoring center to the terminal, and then parses The message is converted into an internal control message agreed upon in the system and delivered to the main control thread for further processing; 3) GPS data acquisition/processing thread: After waiting for the main control thread to complete the initialization of the basic hardware device, the thread starts to collect GPS positioning data; after collecting the GPS positioning data, it sends an internal control message to the main control thread to realize the geographical position. The information is updated; at the same time, the collected GPS data is converted according to the agreed data format, and then the GPRS message sending interface is used, and the converted data message is sent to the background monitoring center for processing. 3 Conclusion The technical implementation scheme proposed in the paper focuses on the use of GPRS network for wireless data communication, replacing the traditional GSM short message communication mode, improving data transmission rate and transmission reliability; in addition, based on embedded LINUX system, by using multi-thread design The problem of multi-task parallel processing in the system is solved, and the stability and reliability of the system are ensured. Compared with the existing vehicle terminal, the failure rate is reduced by about 50%; the user experience is better. Manila Power Socket,Philippines Travel Plug,Philippine Electric Socket,Power Outlets In The Philippines Heikki Technology Co., Ltd. , https://www.heikkipower.com